VR en veldstudie om de interactie tussen voetgangers en autonome voertuigen te analyseren
Er is veel onderzoek gaande naar interactie tussen slimme infrastructuur en autonome voertuigen, tussen voertuigen onderling en tussen de voertuigen en hun bestuurders. Over de interactie met andere weggebruikers buiten het voertuig is echter maar weinig bekend. Die interactie met weggebruikers als fietsers en voetgangers is juist van groot belang, daar deze groep relatief kwetsbaar is, en de mens en robotauto in de toekomst – letterlijk – naast elkaar zullen moeten bestaan op de weg.
Een van de belangrijkste doelen van ons onderzoek is vaststellen hoe zelfrijdende voertuigen het gedrag van voetgangers beïnvloeden. Omdat de conventionele interactie tussen de bestuurder en weggebruiker ontbreekt, worden verschillende, op het voertuig bevestigde ‘externe mens-machine- interfaces (eHMI genoemd) getest op hun effectiviteit en veiligheid, middels een studie op de openbare weg.

Omdat praktijktests een risico voor voetgangers kunnen vormen en over het algemeen kostbaar en soms omslachtig zijn om te worden uitgevoerd, kunnen ook Virtual Reality-technieken zoals een VR- bril en bewegingsdetectie worden gebruikt om verkeersscenario's te simuleren. Dit is een bewezen efficiënte, veilige en kosteneffectieve techniek voor simulaties. Of de resultaten echter realistisch en effectief genoeg zijn om de interactie tussen autonome voertuigen en voetgangers betrouwbaar te testen, is nog niet bewezen.
Beide kwesties komen in ons onderzoek aan bod: het valideren van verschillende typen eHMI en het vergelijken van verschillende testmethoden. De belangrijkste onderzoeksvragen van onze studie zijn: Verhoogt de aanwezigheid van een externe menselijke machine-interface de veiligheid en de verkeersstroom in vergelijking met de aanwezigheid van een actieve bestuurder in termen van veiligheidsafstand? En hoe verschillen de voetgangersprestaties in termen van snelheids- en afstandsperceptie en gedrag in Virtual Reality (VR) in vergelijking met de realiteit?
Het Researchlab Automated Driving Delft (RADD) helpt ons onze studie te realiseren door ons technische apparatuur en ondersteuning bij de experimenten aan te bieden.

Rakshit Agarwal & Marc Barendse – TU Delft
Bent u geïnteresseerd in deelname of wilt u meer informatie? Neem dan contact met ons op via
https://www.linkedin.com/in/rakshit-agarwal-432173b0/
https://www.linkedin.com/in/marc-barendse/
Ooit wel eens achterin een auto gezeten en geprobeerd een boek te lezen? Of een filmpje op je telefoon te kijken? Er zijn mensen die dit lang vol kunnen houden, maar na lange tijd komt het bij iedereen op: misselijkheid.
Wagenziekte ontstaan door het gebruik van autonome auto’s is een intrigerend onderwerp . Dit is de reden waarom Tugrul Irmak, Ph.D. binnen de 3mE faculteit van de TU Delft, een onderzoek heeft gedaan naar de mate van comfort van een autorit, gefocust op wagenziekte. In de afgelopen maand heeft hij zijn tweede onderzoek over dit onderwerp gedaan, waarin ook naar het gebruik van multimedia tijdens een autorit behandeld wordt.
Wij van het RADD hopen dat het onderzoek resulteert in interessante resultaten die zullen bijdrage voor verdere ontwikkelingen binnen dit veld.
Naast onderzoek naar de interactie tussen automatische voertuigen en hun omgeving worden bij RADD ook ondersteunende experimenten uitgevoerd. Een voorbeeld is het experiment van Menglin Pang, die de mogelijkheden om positiebepaling van voertuigen onderzoekt om automatisch rijden te verbeteren.
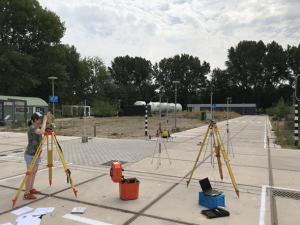
“My name is Menglin Pang, I am currently pursuing the master degree under track Geoscience and Remote Sensing. My thesis project is to explore the feasibility of combining GNSS (Global Navigation Satellite System) with an optical sensor (a single camera) in the application of enhancing vehicle positioning performance. It has the potential to be used in ADAS (Advanced Driver Assisted System) or automated driving application through further implementation.

On the morning of 25th of July, with a nice weather, a field experiment took place at Green village with the assistance and support from the Department of Transportation and Planning and RADD. The experiment lasted about 3.5 hours. First to set up GNSS receivers, then define the orientation of local coordinates, third is to take measurements under the local frame, and finally take measurements by the camera.”
Het 1-jarig bestaan van Researchlab Automated Driving Delft is gevierd op 14 juni. Partners, onderzoekers en andere genodigden genoten van een heerlijk ‘walking dinner’, in een afwisselend programma van presentaties. Een samenkomst van professionals met een gezamenlijke ambitie: automatisch rijden verwezenlijken.

De avond begon feestelijk met een glas bubbels op het zonnige terrein The Green Village. In de evenemententent was het een weerzien van bekenden en gelijkgestemden op het gebied van automatisch rijden. Onder het genot van het ‘walking dinner’, verzorgd door cateraar Pieter Overgaag, was er voldoende gelegenheid om van gedachten te wisselen over vooruitgang en onderzoek in het werkveld van RADD.

De gesprekken werden onderbroken door plenaire pitches van verschillende partners: Royal Haskoning DHV, Goudappel Coeffeng, AON, Connekt en MRDH hebben in het kort hun ambities om automatisch rijden te verwezenlijken kenbaar gemaakt. Verder heeft het Driverless Studententeam een pitch gegeven over de automatische rijdende race auto die ze komend jaar willen gaan bouwen. Daarnaast is de onderzoeksagenda en het toekomstbeeld van RADD gepresenteerd. Het doel van RADD is op deze manier heel direct benaderd – de verbinding tussen wetenschap, overheden en het bedrijfsleven maken.
Een aantal innovaties werd toegelicht door demonstraties. Voertuigen zoals de Mission Bus, de auto van Buurautonoom en een BMW die onderdeel was van het platooning experiment van AON en TNO stonden buiten opgesteld en waren een mooie aanleiding tot gesprek en discussie. De VR-experience van Pablo Nunez Velasco was een mooie gelegenheid om de interactie met een automatisch voertuig te ondergaan. Daarnaast bracht Paul van Gent met de slimme fiets ook fietsonderzoek onder de aandacht. In de tent stond verder ook nog een schaalmodel van de nieuwe shuttle van 2getthere. Als laatste reed er buiten de Toyata Prius rond die met behulp van GPS sensoren en camera’s binnen in de tent gevolgd kon worden op het dashboard monitoring systeem.

De aanwezigheid van partners en andere genodigden is bevestigd met een handtekening op het sponsorbord. Dit gaf een symbolische bijdrage weer van alle aanwezigen aan de ontwikkeling van automatisch vervoer.
De samenkomst van partners, onderzoekers en andere betrokkenen, de talrijke demonstraties van reeds gerealiseerd projecten en de gezamenlijke intentie om automatisch rijden te realiseren maakt RADD trots. We kijken terug op een succesvol eerste jaar en zijn zeer positief over de toekomst van Researchlab Automated Driving Delft, waarin veel experimenten en samenwerkingen tot stand zullen komen die op zichzelf gevierd zullen worden!
Met de autonome auto naar Frankrijk is in de toekomst een plezierig begin van de vakantie. In het experiment van Tugrul Irmak (PhD bij de faculteit 3me) wordt een slingerend parcours afgelegd om de effecten van automatisch rijden op wagenziekte te testen.
In de maand juli maakt Irmak gebruik van een dynamische afzetting van de Heertjeslaan te Delft om het experiment met Toyota Prius uit te voeren.
“Research suggests that with the advent of fully autonomous cars a sizable number of us (~8%) will experience severe motion sickness, often to always. With such a bleak outlook it is pivotal to understand the mechanisms of sickness, as, such an understanding will yield to methods of mitigating and minimizing it. This is what we endeavor to do here. How does vision affect sickness? How does sickness develop? How does sickness manifest itself both subjectively and objectively? How does sickness affect our postural stability? At what rate do we recover from sickness? How does our sensitivity to further motion change upon sickness? These are amongst some of the questions we are working to address. The fruits of such labor will have consequences for active suspension design, path following and planning. Thus the research is of importance, both from the perspective of fundamental science but also from that of practical application. We are delighted that we are able to perform it here, in earnest.”

Een student van het master programma Systems & Control is op zoek naar een afstudeerproject in het gebied van automatische rijden. Hij kan hierbij gebruik maken van de faciliteiten van het RADD.
Bent u of kent u iemand die een opdracht voor hem heeft, stuur dan een mail naar: info@raddelft.nl
Meer informatie of het master programma Systems and Control
Een manier om de prestatie van het verkeersnetwerk te verbeteren is door middel van fietsers voorzien van snelheidsadvies (of getoond in een andere vorm) tijdens de rit via een app. Het probleem in Nederland is dat verkeerslichten regelen op basis van verkeersaanbod en dat daardoor het lastig is vooraf te voorspellen hoe lang je staat te wachten.
In samenwerking met Technolution en de gemeente Rotterdam worden de mogelijkheden verkend voor een applicatie die in staat is om reistijden voor fietsers te kunnen aangeven. Hiervoor kan gebruik gemaakt worden van data uit verkeerslichten.
Dit onderzoek valt onder het onderzoeksthema: Verkeersnetwerk Prestaties en Verkeersmanagement Interregionaal Recherche Team Automatische Voertuigen
Dinsdag 27 juni opent minister Schultz van Haegen het Researchlab Automated Driving Delft (RADD) in The Green Village op de campus van de TU Delft.
Dit researchlab biedt volop ruimte aan experimenten met automatisch rijden. Ook is er de mogelijkheid experimenten met automatische vervoerders van dichtbij mee te maken. U vindt hier een overzicht van de verschillende demo’s.
DEMO A op de testbaan
Verkeerssituatie tussen Jackal, Prius en Wepod.
Javier Alonso, TU Delft (Engels sprekend)
DEMO B in de controlroom
Output camera Wepod
Paul van Koningsbruggen, Technolution
Monitoringssysteem voor fietsen
Winnie Damen, TU Delft
DEMO C op het grasveld
Prius met algoritmes om te leren van camerabeelden
Dariu Gavrila, TU Delft
Zelfvarende boot
Rudy Negenborn TU Delft
Virtueel verkeerslicht
Robbin Blokpoel, Dynniq
Smartphone app voor testsite alert
Jillis Mani, Intraffic
Twizy
Accenda, Haagse Hogeschool
Bezorgrobot
Britt Siertsema, Domino’s
Meer informatie bij Ilona van den Brink, Wetenschapsvoorlichter TU Delft,
015 278 4259, I.vandenBrink@tudelft.nl
De verwachtingen van geautomatiseerd rijden zijn hooggespannen. De technologie is er 95 procent klaar voor, stelt prof. Dariu Gavrila op vrijdag 23 juni in zijn intreerede aan de TU Delft. De wetenschappelijke uitdagingen liggen vooral in het complexe stadsverkeer en in het omgaan met fietsers en voetgangers.
‘Er vallen wereldwijd ongeveer 1,2 miljoen verkeersdoden per jaar. Meer dan 90 procent hiervan is terug te voeren op een fout van de bestuurder. Deze fouten kunnen door de introductie van zelfrijdende voertuigen worden voorkomen’ stelt prof. Dariu Gavrila van de Delftse faculteit 3mE in zijn intreerede. ‘Daarnaast kun je de tijd die je nu nog gebruikt om de auto te besturen straks beter benutten om productief te zijn, te communiceren, of om juist te ontspannen. Zelfrijdende voertuigen die gedeeld worden, kunnen tevens leiden tot een hogere verkeersefficiëntie met minder voertuigen. Daardoor kan de ruimte die nu nog wordt gebruikt voor parkeren, hergebruikt worden om de stad leefbaarder te maken.’
 De nieuwe Intelligent Vehicles demonstrator van de TU Delft rijdt rond op campus.
De nieuwe Intelligent Vehicles demonstrator van de TU Delft rijdt rond op campus.
Laatste procenten
De technologie voor zelfrijdende voertuigen is er 95 procent klaar voor, stelt Gavrila (die voorheen 20 jaar werkzaam was bij Daimler R&D, de maker van Mercedes-Benz). ‘Die laatste paar procenten zijn, zoals zo vaak, het lastigste om te realiseren. Het snelweg-scenario is wetenschappelijk gezien grotendeels opgelost – de eerste zelfrijdende auto’s (met nog beperkte functionaliteit) zijn op de markt. Maar verkeer in de stad is een ander verhaal. Dat scenario is veel complexer door kruisend verkeer, minder duidelijke straatmarkering, de vele verkeersborden en signalen, en de nabijheid van andere weggebruikers zoals fietsers en voetgangers.’
Interactie en anticipatie
Waar het huidige zelfrijdende voertuig nog moeite mee heeft, is de interactie met de (niet zelfrijdende) weggebruikers. Het voertuig moet kunnen anticiperen: de intentie van een andere weggebruiker vroegtijdig herkennen , om daarop te kunnen reageren. Anders moet er overmatig voorzichtig gereden worden. ‘Je zou in principe nu al een zelfrijdende auto zonder bestuurder Amsterdam in kunnen sturen, maar dan laat je die 5 km per uur rijden en overal voor stoppen,’ stelt Gavrila. ‘Dat is geen rijstijl zijn die sociaal acceptabel zou zijn.’
Technieken die met behulp van big data automatisch leren hoe weggebruikers eruit zien en hoe ze zich doorgaans gedragen, kunnen helpen de verkeerssituatie beter in te schatten. Andersom moet het zelfrijdende voertuig ook zijn intentie aan de omgeving laten zien op een voor de andere weggebruikers begrijpelijke manier. Het zelfrijdende voertuig moet zich tenslotte op een comfortabele manier voor de inzittenden voortbewegen. ‘Dit zijn precies de vraagstukken waarmee onze nieuwe Intelligent Vehicles onderzoeksgroep aan de TU Delft zich bezighoudt,’ aldus Gavrila.
 Blik vanuit de nieuwe Intelligent Vehicles demonstrator van de TU Delft – intentie herkenning van de andere weggebruikers is essentieel.
Blik vanuit de nieuwe Intelligent Vehicles demonstrator van de TU Delft – intentie herkenning van de andere weggebruikers is essentieel.
De introductie op de markt
Op de vraag “wanneer komt de zelfrijdende auto” is geen simpel antwoord mogelijk. Dat ligt allereerst aan de ruime invulling van het begrip ‘zelfrijdend’. Heeft de mens bijvoorbeeld nog een rol als ‘back-up’ bestuurder voor noodgevallen? Hoe veelzijdig is het gebied waarin de zelfrijdende functionaliteit wordt aangeboden? Onder welke condities werkt het systeem (weer, dag/nacht)? Welke manier van rijden is mogelijk (snelheid, vrij rijden of slechts achter een ander voertuig) en welke ondersteuning is er vanuit de infrastructuur nodig? Naast technologische kwesties zijn er nog open vragen wat betreft aanpassing en harmonisatie van wetgeving. ‘Uiteindelijk is de acceptatie en vertrouwen van de weggebruikers doorslaggevend’, aldus Gavrila. ‘De introductie van de zelfrijdende auto zal daarom gefaseerd verlopen’.
Gavrila verwacht vanaf 2020 zelfrijdende auto’s op de snelweg die het toestaan dat de bestuurder zijn ogen langdurig van de weg houdt om bijvoorbeeld een smartphone te bedienen, bij 100 km/h en hoger.’ Momenteel rijden er al honderden zelfrijdende auto’s van Waymo (Google) en Uber als ‘robot taxi’s’ door de straten van Pittsburgh en Phoenix in de VS – nog wel met een back-up bestuurder. Binnen 2 tot 3 jaar vinden de eerste grootschalige tests plaats zonder back-up bestuurder, in vereenvoudigde condities.’ Gavrila verwacht dat het minstens tot 2030 gaat duren voordat robot taxi’s net zo efficiënt als, maar veiliger dan de menselijke bestuurder rond rijden in een stad als Amsterdam, met een “sociale” rijstijl. ‘Tegen die tijd hebben zelfrijdende voertuigen onze mobiliteit ingrijpend veranderd.’
Opening RADD-lab met demo
Naast de intreerede van Gavrila op vrijdag 23 juni, is er op dinsdag 27 juni een ander evenement aan de TU Delft waar zelfrijdende voertuigen in het middelpunt van de belangstelling staan. Dit betreft de opening van het Researchlab Automated Driving Delft (RADD) in The Green Village op de campus van de TU Delft. Dit lab biedt volop ruimte aan experimenten met automatisch rijden. Minister Schultz van Infrastructuur en Milieu verricht de opening van het lab.
Meer informatie?
Intreerede prof. dr Dariu Gavrila ‘The Intelligent Vehicles (R)evolution’
Datum: Vrijdag 23 juni om 15:00
Locatie: Aula congrescentrum TU Delft